This article explains the intuition behind the change of basis matrix.
Change of basis
You can represent a vector by its coordinates in a basis. For instance, here are the coordinates for the vector in two different basis and :
Base 1 (, )
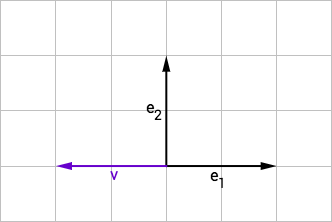 \[\color{blue}{\vec{v}} = \begin{pmatrix}-1\\0\end{pmatrix}^e = -1 e_1 + 0 e_2 \]
\[\color{blue}{\vec{v}} = \begin{pmatrix}-1\\0\end{pmatrix}^e = -1 e_1 + 0 e_2 \]
Base 2 (, )
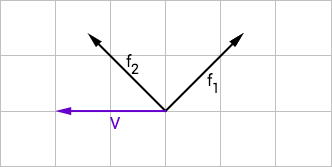 \[\color{blue}{\vec{v}} = \begin{pmatrix}-0.5\\+0.5\end{pmatrix}^f = -0.5 f_1 + 0.5 f_2 \]
\[\color{blue}{\vec{v}} = \begin{pmatrix}-0.5\\+0.5\end{pmatrix}^f = -0.5 f_1 + 0.5 f_2 \]
The change of basis matrix
We can use a matrix to transform the coordinates of in the basis into the coordinates in the basis . This matrix is called the change of basis matrix.
How do we find this matrix? Since it takes the coordinates of a vector in basis and gives the coordinates in the basis , we can start by expressing the vectors and in basis .
- In basis : and
…and…
- In basis : and .
So we are looking for the matrix such that:
…and…
Since is the first column of and is the second column of , we find that the change of basis matrix is the matrix made of the vector column of the old basis expressed in the new basis . We note the coordinates of vector in base .
Using this matrix, we can translate the coordinates for from basis to basis :
From vector notation to sum notation
Sometimes, it’s useful to remember that matrix multiplication can be expressed as a sum of vectors using linearity.
The change of basis matrix allows us to write equations where some vectors are expressed in base (left hand side) while others are in base (right hand side).
Using the notation for the coordinates of vector in base :
Where every vector in the last equation is expressed in base .